ARIMA
Applications of Data Science - Class 21
Giora Simchoni
Stat. and OR Department, TAU
2023-04-10
Motivation
<- calves_tr |> model (Mean = MEAN (log_count),Naive = NAIVE (log_count),Seasonal_naive = SNAIVE (log_count),LM = TSLM (log_count ~ trend ()),Arima = ARIMA (log_count)<- models_fit |> forecast (calves_te)|> accuracy (data = calves_te,measures = list ("RMSE" = RMSE, "MAE" = MAE)
# A tibble: 5 × 4
.model .type RMSE MAE
<chr> <chr> <dbl> <dbl>
1 Arima Test 0.290 0.246
2 LM Test 0.718 0.575
3 Mean Test 1.08 0.904
4 Naive Test 1.21 1.05
5 Seasonal_naive Test 0.465 0.393
Random Processes & Stationarity
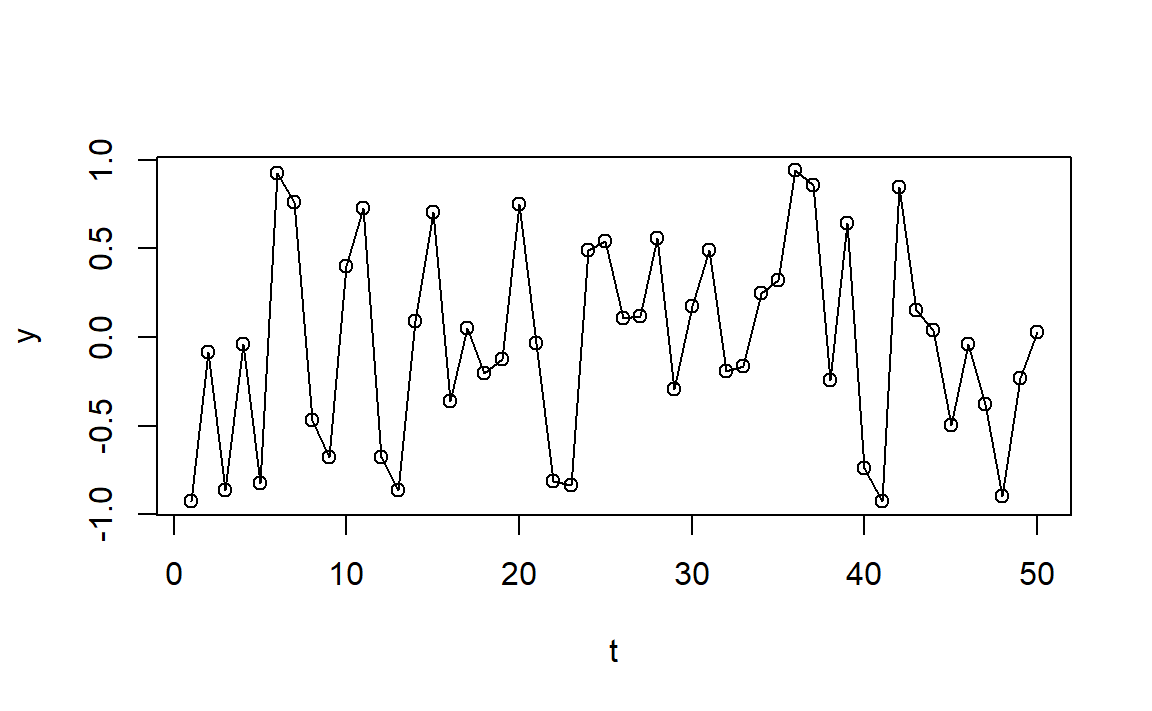
White Noise
\(e_1, e_2, \dots\) are i.i.d RVs with mean 0 and variance \(\sigma^2\) , and
\[\begin{aligned}
Y_1 &= e_1 \\
Y_2 &= e_2 \\
& \vdots \\
Y_t &= e_t
\end{aligned}\]
<- runif (50 , - 1 , 1 )plot (y, type = "o" , xlab = "t" )
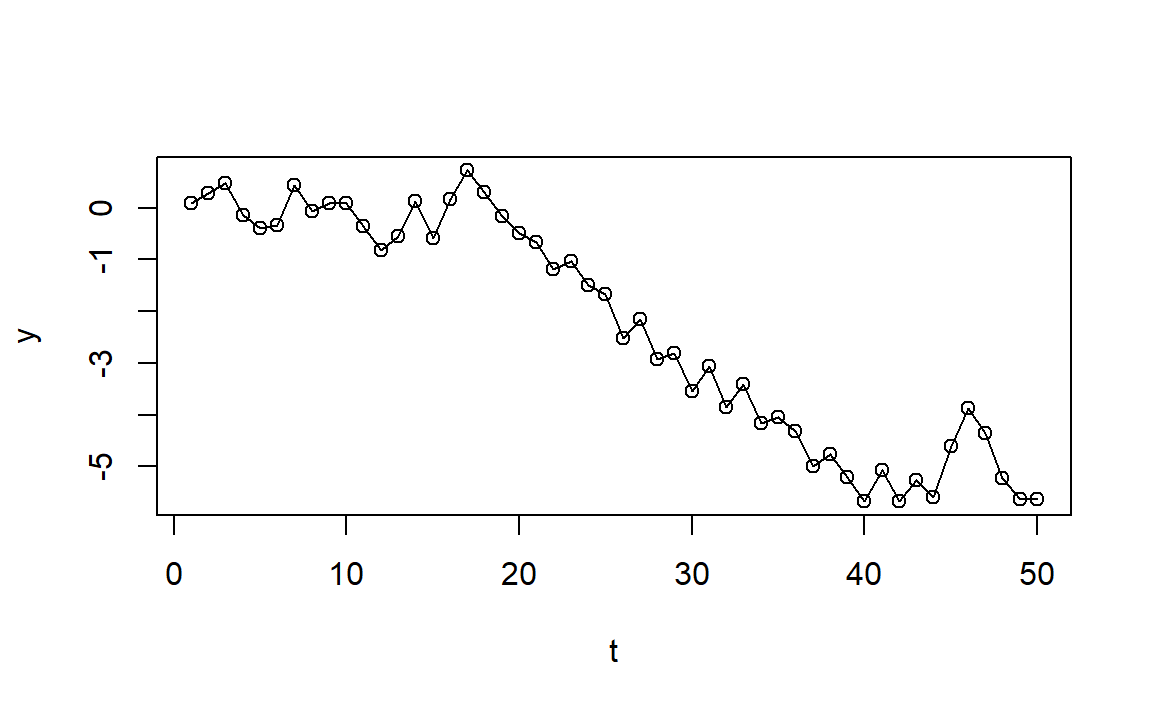
Random Walk
\[\begin{aligned}
Y_1 &= e_1 \\
Y_2 &= e_1 + e_2 \\
& \vdots \\
Y_t &= e_1 + \dots + e_t
\end{aligned}\]
Or simply: \(Y_t = Y_{t - 1} + e_t\)
<- cumsum (runif (50 , - 1 , 1 ))plot (y, type = "o" , xlab = "t" )
Simple Moving Average
\[\begin{aligned}
Y_2 &= \frac{e_{2} + e_{1}}{2} \\
& \vdots \\
Y_t &= \frac{e_{t} + e_{t-1}}{2}
\end{aligned}\]
<- cumsum (runif (50 , - 1 , 1 ))<- (cy[2 : length (cy)] + cy[1 : (length (cy) - 1 )]) / 2 plot (y, type = "o" , xlab = "t" )
Stationarity
“probability laws that govern the behavior of the process do not change over time”
Strong: \(Pr(Y_{t_1} < y_{t_1}, \dots, Y_{t_n} < y_{t_n}) = Pr(Y_{t_1-k} < y_{t_1-k}, \dots, Y_{t_n-k} < y_{t_n-k})\) , for all choices of \(t_1, \dots, t_n\) and lag \(k\)
Weak:
\(E(Y_{t}) = E(Y_{t + k})\) (mean constant over time)\(Cov(Y_t, Y_{t-k}) = Cov(Y_k, Y_0)\) (covariance depends on lag \(k\) only) If \(Y_t \sim \mathcal{N}\) strong and weak requirements coincide.
So, which processes are (weakly) stationary?
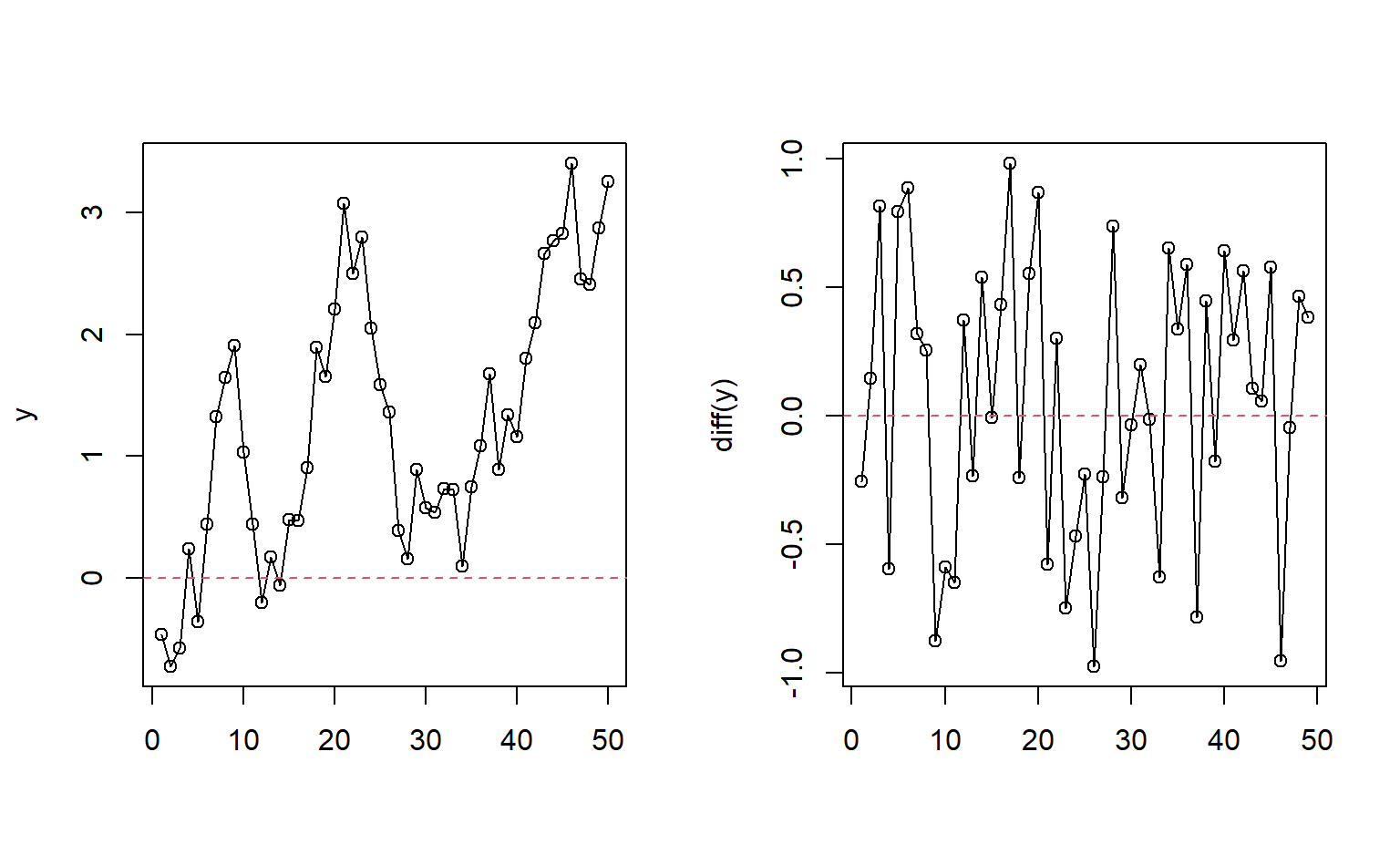
How to “make” Random Walk stationary?
Differencing: \(Y_t - Y_{t - 1} = e_t\)
set.seed (1 )<- cumsum (runif (50 , - 1 , 1 ))par (mfcol = c (1 , 2 ))plot (y, type = "o" , xlab = "" )abline (h = 0 , lty = 2 , col = 2 )plot (diff (y), type = "o" , xlab = "" )abline (h = 0 , lty = 2 , col = 2 )
AR(p)
An observation \(Y_t\) is a linear combination of past \(p\) most recent observations:
\[
Y_t = \mu + \phi_1 Y_{t-1} + \phi_2 Y_{t-2} + \dots + \phi_p Y_{t-p} + e_t
\] where \(e_t\) is an “innovation” term as before, thus \(Cov(e_t, Y_{t-k})=0\) for every \(k > 0\) .
E.g. \(Y_t = 1 + 0.5Y_{t-1} + 0.1Y_{t-2} - 0.1Y_{t-3} + e_t\)
<- 1 + arima.sim (list (order = c (3 ,0 ,0 ), ar = c (0.5 , 0.1 , - 0.1 )), n = 50 )plot (y, type = "o" , xlab = "t" )
AR(1)
Let the process mean \(\mu\) be subtracted:
\[
Y_t = \phi Y_{t-1} + e_t
\]
What if \(\phi = 0\) ? What if \(\phi = 1\) ?
\(E(Y_t) = \phi E(Y_{t-1}) + E(e_t) = \dots = 0\)
From stationarity:
\(Var(Y_t) = \phi^2Var(Y_t) + \sigma^2 \rightarrow Var(Y_t) = \frac{\sigma^2}{1-\phi^2}\)
AR(1)
\[\begin{aligned}
Cov(Y_t, Y_{t-k}) &= E(Y_t Y_{t-k}) - E(Y_t)E(Y_{t-k}) \\
&= \phi E(Y_{t-1} Y_{t-k}) - E(e_t Y_{t-k}) \\
& \vdots \\
&= \phi^k Var(Y_t) = \phi^k \frac{\sigma^2}{1-\phi^2}
\end{aligned}\]
\[
\rho_k = Corr(Y_t, Y_{t-k}) = \frac{Cov(Y_t, Y_{t-k})}{\sqrt{Var(Y_t)}\sqrt{Var(Y_{t-k})}} = \phi^k
\]
How would the ACF look like?
Is AR(1) (weakly) stationary?
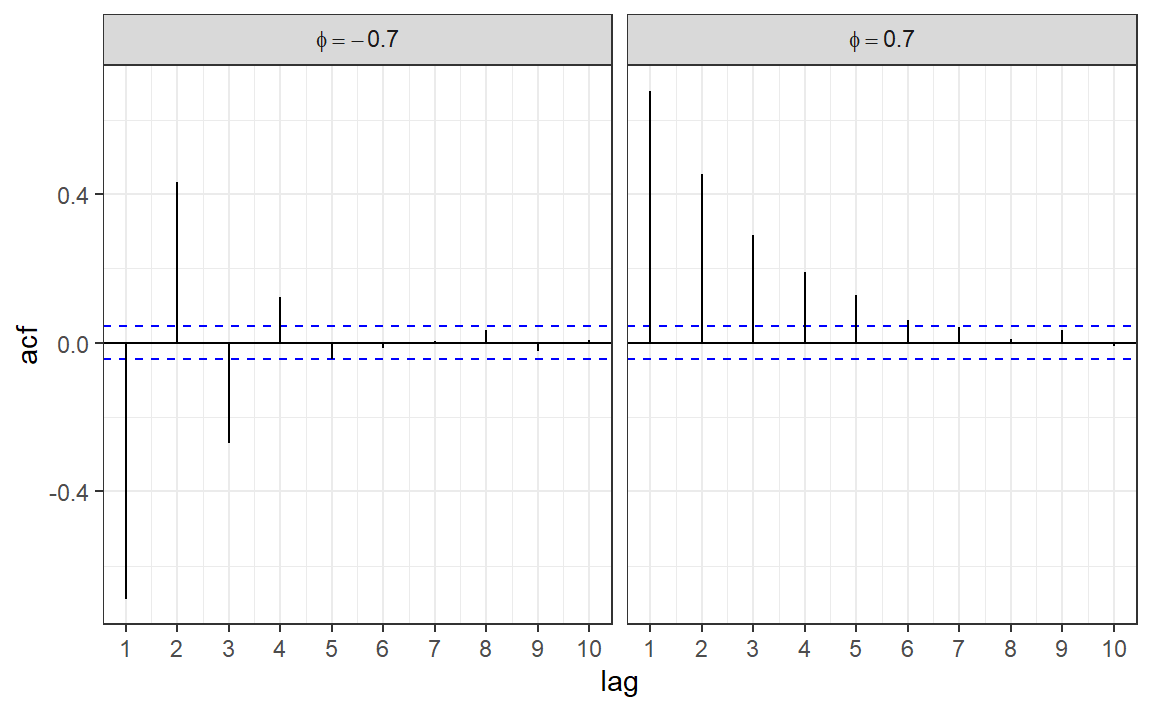
AR(1) - ACF
Code
set.seed (1 )<- 500 <- arima.sim (list (order = c (1 ,0 ,0 ), ar = 0.7 ), n = n)<- arima.sim (list (order = c (1 ,0 ,0 ), ar = - 0.7 ), n = n)<- make_acf_df (y_pos)<- make_acf_df (y_neg)$ phi <- "phi == 0.7" $ phi <- "phi == -0.7" <- bind_rows (acf_df_pos, acf_df_neg)|> ggplot (aes (lag, acf)) + geom_hline (aes (yintercept = 0 )) + geom_hline (aes (yintercept = - 1 / sqrt (n)), color = "blue" , linetype = 2 ) + geom_hline (aes (yintercept = 1 / sqrt (n)), color = "blue" , linetype = 2 ) + geom_segment (aes (xend = lag, yend = 0 )) + facet_grid (. ~ phi, labeller = labeller (phi = label_parsed)) + scale_x_continuous (breaks = 1 : 10 ) + theme_bw ()
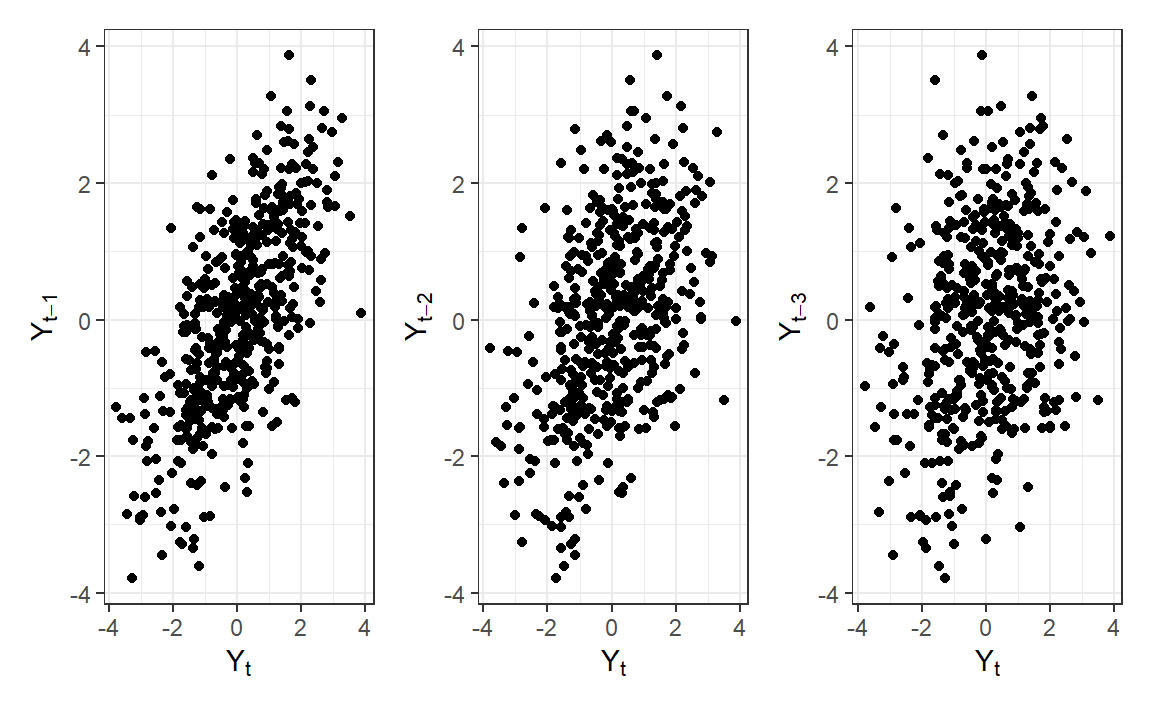
AR(1) - Lag Scatterplots
Code
library (patchwork)<- tibble (y = y_pos,y_lag1 = TSA:: zlag (y_pos, 1 ),y_lag2 = TSA:: zlag (y_pos, 2 ),y_lag3 = TSA:: zlag (y_pos, 3 )<- ggplot (y_lag_df, aes (y, y_lag1)) + geom_point () + labs (x = expression ("Y" [t]), y = expression ("Y" [t-1 ])) + theme_bw ()<- ggplot (y_lag_df, aes (y, y_lag2)) + geom_point () + labs (x = expression ("Y" [t]), y = expression ("Y" [t-2 ])) + theme_bw ()<- ggplot (y_lag_df, aes (y, y_lag3)) + geom_point () + labs (x = expression ("Y" [t]), y = expression ("Y" [t-3 ])) + theme_bw ()| p2| p3
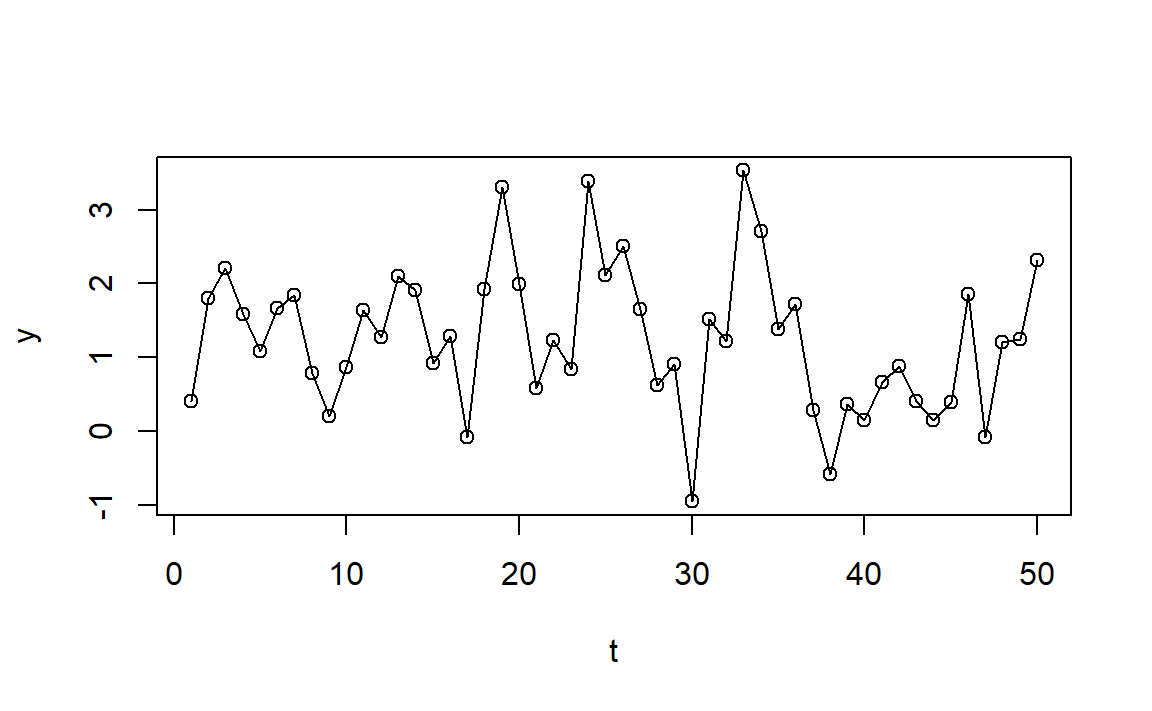
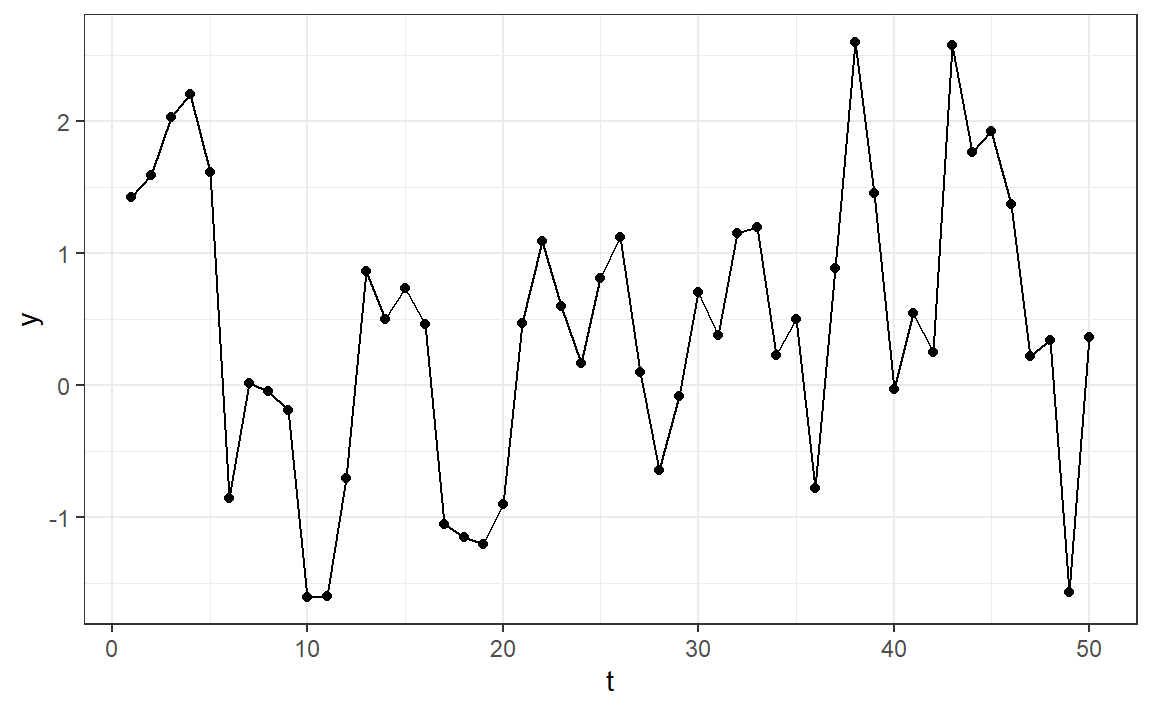
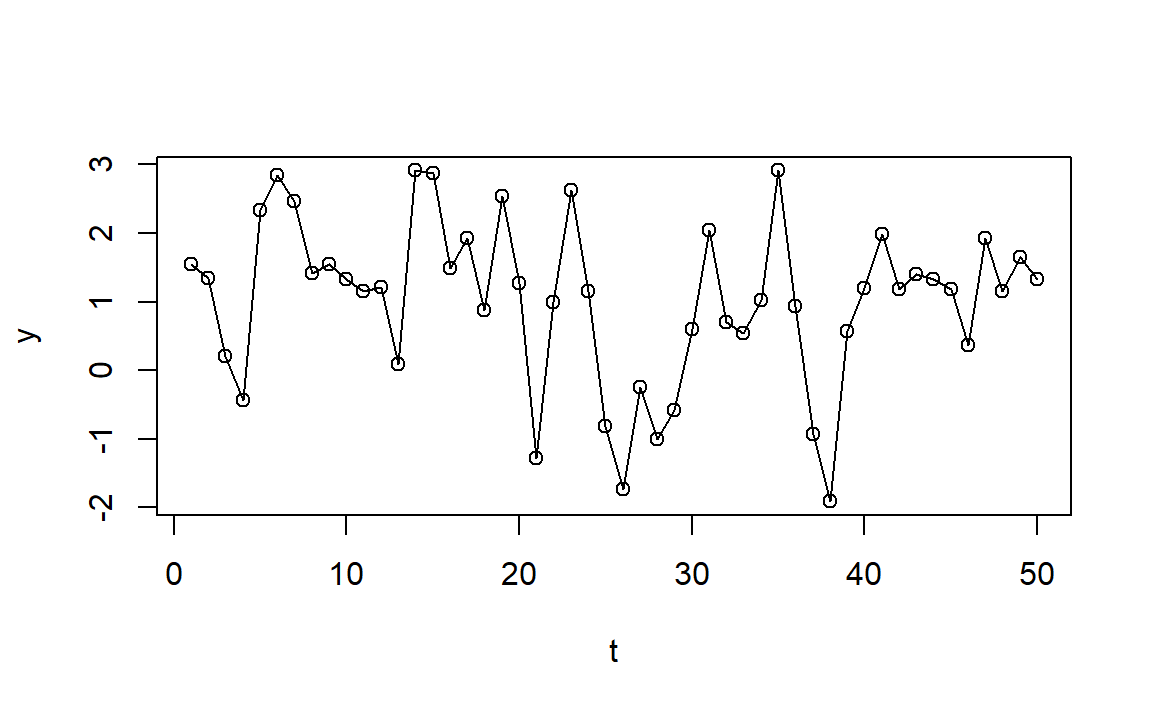
So will you recognize an AR(1) TS when you see it?
tibble (t = 1 : 50 , y = y_pos[1 : 50 ]) |> ggplot (aes (t, y)) + geom_line () + geom_point () + theme_bw ()
AR(2)
\[
Y_t = \phi_1 Y_{t-1} + \phi_2 Y_{t-2} + e_t
\]
\(E(Y_t) = \phi_1 E(Y_{t-1}) + \phi_2 E(Y_{t-2}) + E(e_t) = \dots = 0\)
From stationarity \(\gamma_k = Cov(Y_{t}, Y_{t-k})\) for any \(t, k\) , so:
\[\begin{aligned}
\gamma_0 = Var(Y_t) &= \phi_1^2Var(Y_{t-1}) + \phi_2^2Var(Y_{t-2}) + 2\phi_1\phi_2Cov(Y_{t-1}, Y_{t-2}) + \sigma^2 \\
& = (\phi_1^2 + \phi_2^2)\gamma_0 + 2\phi_1\phi_2\gamma_1 + \sigma^2
\end{aligned}\]
On the other hand:
\[\begin{aligned}
\gamma_1 = Cov(Y_{t}, Y_{t-1}) = E(Y_{t}\cdot Y_{t-1}) &= E([\phi_1 Y_{t-1} + \phi_2 Y_{t-2} + e_t] \cdot Y_{t-1}) \\
&= \phi_1E(Y^2_{t-1}) + \phi_2Cov(Y_{t-1}, Y_{t-2}) = \phi_1\gamma_0 + \phi_2\gamma_1
\end{aligned}\]
Giving… \(\gamma_0 = Var(Y_t) = \left(\frac{1-\phi_2}{1+\phi_2}\right)\frac{\sigma^2}{(1-\phi_2)^2-\phi_1^2}\)
AR(2)
In the same way we can show for any \(k\) :
\[
\gamma_k = Cov(Y_t, Y_{t-k}) = \phi_1\gamma_{k-1} + \phi_2\gamma_{k-2}
\]
\[
\rho_k = Corr(Y_t, Y_{t-k}) = \frac{Cov(Y_t, Y_{t-k})}{\sqrt{Var(Y_t)}\sqrt{Var(Y_{t-k})}} = \phi_1\rho_{k-1} + \phi_2\rho_{k-2}
\]
The Yule-Walker equations! Though there is a closed form.
Counting on \(\rho_0 = 1\) and \(\rho_{-1} = \rho_1\) , we get:
\[
\rho_1 = \frac{\phi_1}{1-\phi_2}; \quad \rho_2 = \frac{\phi_2(1-\phi_2) + \phi_1^2}{1-\phi_2};
\]
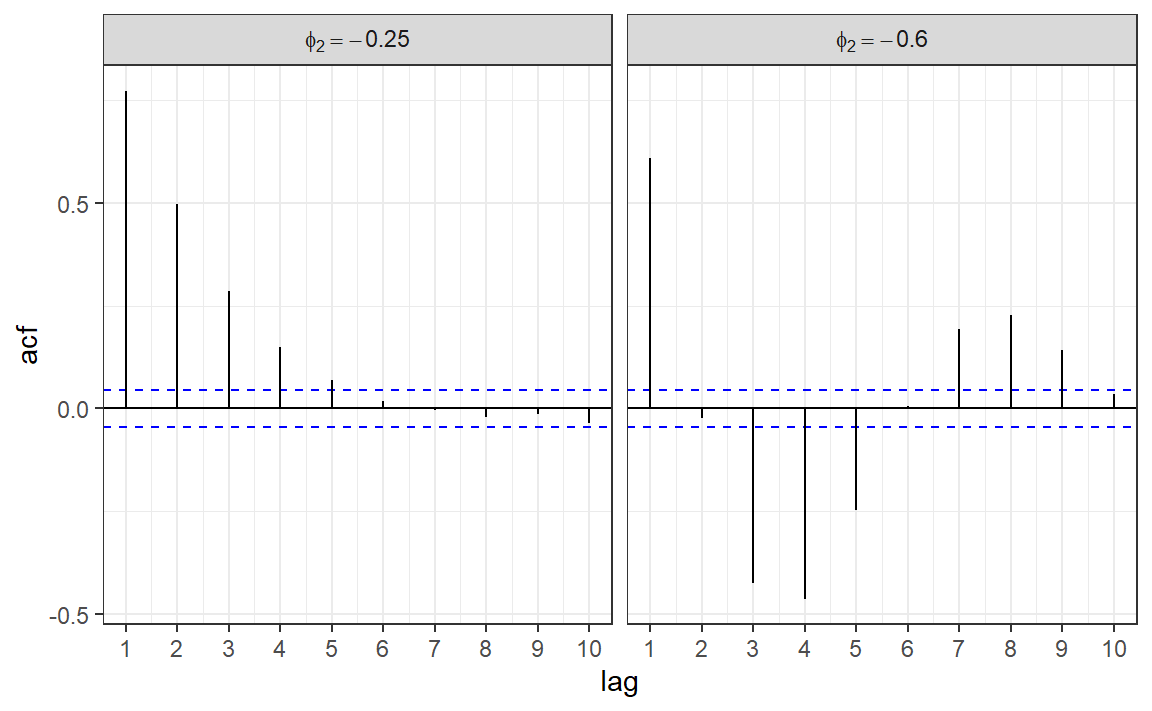
AR(2) - ACF
Here \(\phi_1 = 1\) in both TS:
Code
set.seed (1 )<- 500 <- arima.sim (list (order = c (2 ,0 ,0 ), ar = c (1.0 , - 0.25 )), n = n)<- arima.sim (list (order = c (2 ,0 ,0 ), ar = c (1.0 , - 0.6 )), n = n)<- make_acf_df (y_pos)<- make_acf_df (y_neg)$ phi <- "phi[2] == -0.25" $ phi <- "phi[2] == -0.6" <- bind_rows (acf_df_pos, acf_df_neg)|> ggplot (aes (lag, acf)) + geom_hline (aes (yintercept = 0 )) + geom_hline (aes (yintercept = - 1 / sqrt (n)), color = "blue" , linetype = 2 ) + geom_hline (aes (yintercept = 1 / sqrt (n)), color = "blue" , linetype = 2 ) + geom_segment (aes (xend = lag, yend = 0 )) + facet_grid (. ~ phi, labeller = labeller (phi = label_parsed)) + scale_x_continuous (breaks = 1 : 10 ) + theme_bw ()
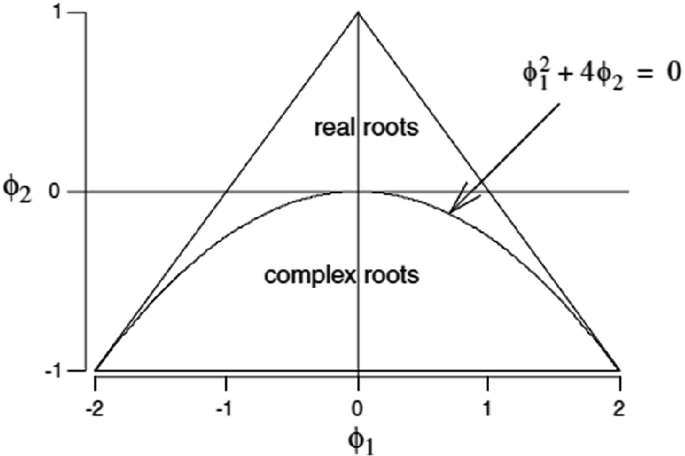
Stationarity Conditions
In AR(1) we only needed \(|\phi| < 1\) .
In AR(2), for example, from \(\rho_1 = \frac{\phi_1}{1-\phi_2}\) it is clear that if \(\phi_2 < 1\) : \(\phi_1 + \phi_2 < 1\) and \(\phi_2 - \phi_1 < 1\)
In general it can be shown that for AR(p) to be stationary the characteristic equation \(1-\phi_1x-\phi_2x^2- \dots -\phi_px^p = 0\) needs \(p\) roots above 1 in absolute value.
For AR(1): \(1-\phi x = 0 \rightarrow |1/\phi| > 1 \rightarrow |\phi| < 1\)
For AR(2): \(1-\phi_1x-\phi_2x^2 = 0 \rightarrow \left|\frac{\phi_1 \pm \sqrt{\phi_1^2 + 4\phi_2}}{-2\phi_2}\right| > 1 \rightarrow \phi_1 + \phi_2 < 1, \phi_2 - \phi_1 < 1, |\phi_2| < 1\)
Unit Root Tests
In general, the roots must lie outside the unit circle in the complex plane, hence we have unit-roots tests, to test for stationarity:
# Augmented Dicky-Fuller (ADF) Test, H0: non-stationary :: adf.test (y_pos, k = 0 )
Augmented Dickey-Fuller Test
data: y_pos
Dickey-Fuller = -7.8867, Lag order = 0, p-value = 0.01
alternative hypothesis: stationary
# KPSS Test, H0: stationary unitroot_kpss (y_pos)
kpss_stat kpss_pvalue
0.1039691 0.1000000
See also unitroot_ndiffs() in fable for determining how many diffs are needed for stationarity.
MA(q)
An observation \(Y_t\) is a linear combination of past \(q\) most recent errors:
\[
Y_t = \mu + e_t + \theta_1 e_{t-1} + \theta_2 e_{t-2} + \dots + \theta_q e_{t-q}
\] where \(e_t\) is an “innovation” term as before.
E.g. \(Y_t = 1 + e_t + 0.5e_{t-1} + 0.1e_{t-2} - 0.1e_{t-3}\)
<- 1 + arima.sim (list (order = c (0 ,0 ,3 ), ma = c (0.5 , 0.1 , - 0.1 )), n = 50 )plot (y, type = "o" , xlab = "t" )
MA(1)
Let the process mean \(\mu\) be subtracted:
\[
Y_t = e_t + \theta e_{t-1}
\]
\(E(Y_t) = E(e_t) + \theta E(e_{t-1}) = 0\)
\(\gamma_0 = Var(Y_t) = Var(e_t) + \theta^2Var(e_{t-1}) = (1+\theta^2)\sigma^2\)
\(\gamma_1 = Cov(Y_t, Y_{t-1}) = Cov(e_t + \theta e_{t-1}, e_{t-1} + \theta e_{t-2}) = \theta\sigma^2\)
\(\rho_1 = \frac{\gamma_1}{\gamma_0} = \frac{\theta}{1+\theta^2}\)
What would be \(\gamma_k, \rho_k\) for \(k > 1\) ? How would the ACF look like?
Is MA(1) (weakly) stationary?
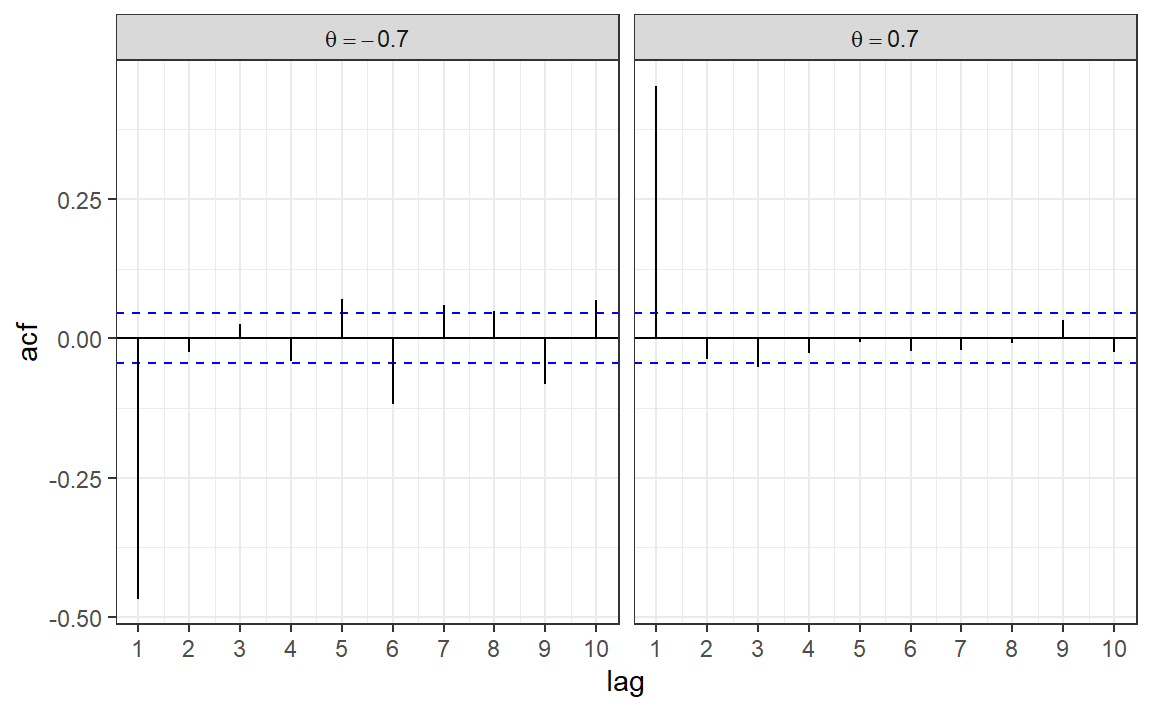
MA(1) - ACF
Code
set.seed (1 )<- 500 <- arima.sim (list (order = c (0 ,0 ,1 ), ma = 0.7 ), n = n)<- arima.sim (list (order = c (0 ,0 ,1 ), ma = - 0.7 ), n = n)<- make_acf_df (y_pos)<- make_acf_df (y_neg)$ phi <- "theta == 0.7" $ phi <- "theta == -0.7" <- bind_rows (acf_df_pos, acf_df_neg)|> ggplot (aes (lag, acf)) + geom_hline (aes (yintercept = 0 )) + geom_hline (aes (yintercept = - 1 / sqrt (n)), color = "blue" , linetype = 2 ) + geom_hline (aes (yintercept = 1 / sqrt (n)), color = "blue" , linetype = 2 ) + geom_segment (aes (xend = lag, yend = 0 )) + facet_grid (. ~ phi, labeller = labeller (phi = label_parsed)) + scale_x_continuous (breaks = 1 : 10 ) + theme_bw ()
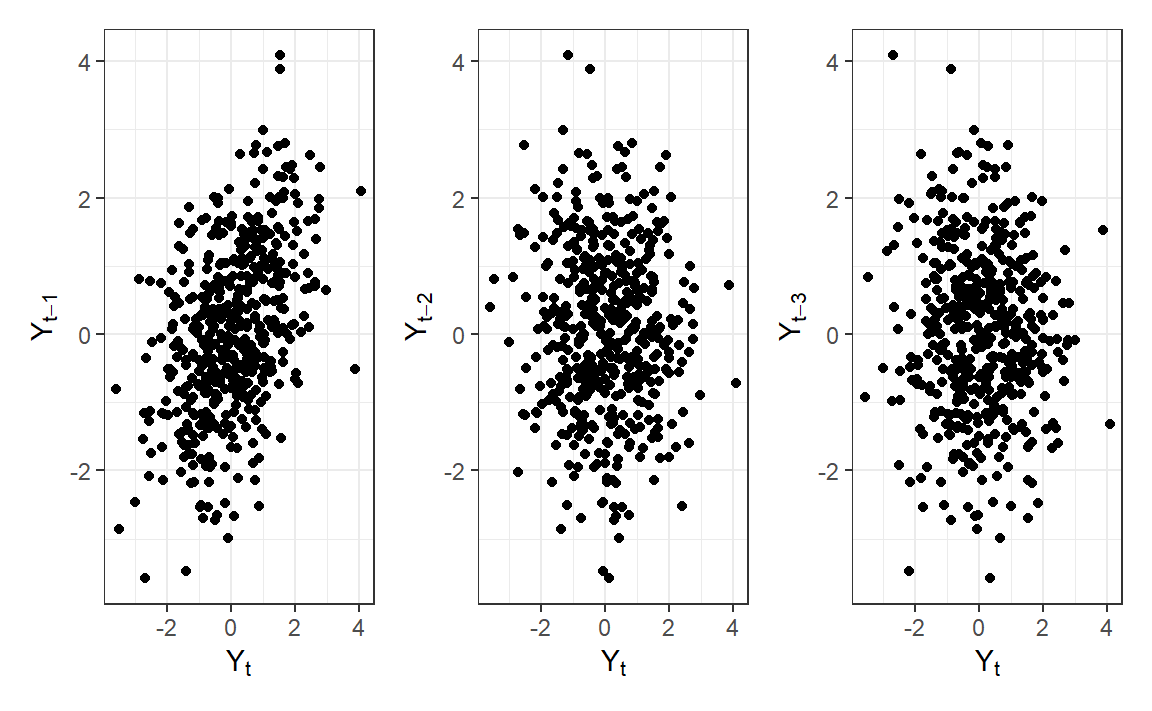
MA(1) - Lag Scatterplots
Code
library (patchwork)<- tibble (y = y_pos,y_lag1 = TSA:: zlag (y_pos, 1 ),y_lag2 = TSA:: zlag (y_pos, 2 ),y_lag3 = TSA:: zlag (y_pos, 3 )<- ggplot (y_lag_df, aes (y, y_lag1)) + geom_point () + labs (x = expression ("Y" [t]), y = expression ("Y" [t-1 ])) + theme_bw ()<- ggplot (y_lag_df, aes (y, y_lag2)) + geom_point () + labs (x = expression ("Y" [t]), y = expression ("Y" [t-2 ])) + theme_bw ()<- ggplot (y_lag_df, aes (y, y_lag3)) + geom_point () + labs (x = expression ("Y" [t]), y = expression ("Y" [t-3 ])) + theme_bw ()| p2| p3
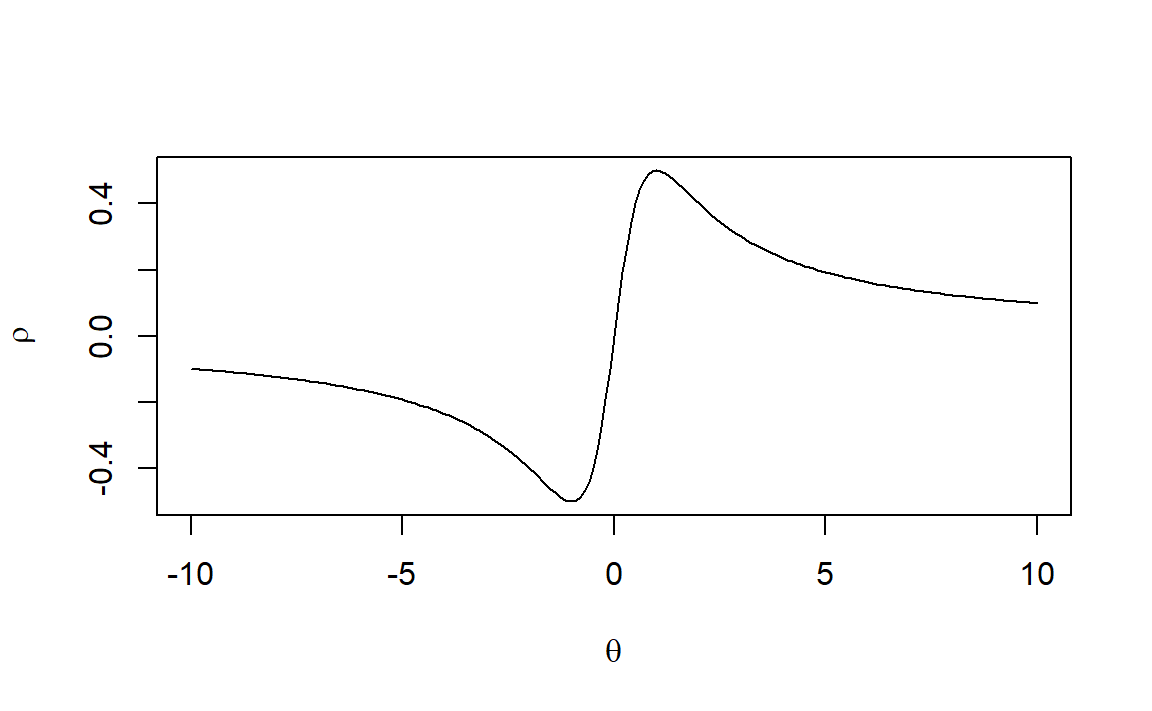
MA(1) - Inveritibility
Can \(\theta\) be any number? Can \(\rho\) be any correlation?
<- seq (- 10 , 10 , 0.1 )<- theta / (1 + theta^ 2 )plot (theta, rho, type = "l" , xlab = expression (theta), ylab = expression (rho))
\(\rho\) is in \((-\frac{1}{2}, \frac{1}{2})\)
\(|\theta| < 1\) , otherwise the model is not identifiable.
MA(1) - Inveritibility
Actually, every MA(q) process can be written as AR(\(\infty\) )!
\[\begin{aligned}
Y_t = e_t + \theta e_{t-1} &= e_t + \theta (Y_{t-1} - \theta e_{t-2}) \\
&= e_t + \theta Y_{t-1} - \theta^2 (Y_{t-2} - \theta e_{t-3}) \\
&\vdots \\
&= e_t + \theta Y_{t-1} - \theta^2 Y_{t-2} - \theta^3 Y_{t-3} - \dots
\end{aligned}\]
Thus, having \(|\theta| < 1\) is called invertibility condition and is very similar to stationarity conditions.
And, every AR(p) model can be written as MA(\(\infty\) ).
In general it can be shown that for MA(q) to be invertible the characteristic equation \(1-\theta_1x-\theta_2x^2- \dots -\theta_qx^q = 0\) needs \(q\) roots above 1 in absolute value.
ARMA(p, q)
A mixed autoregressive moving average process (ARMA):
\[
Y_t = \mu + \phi_1 Y_{t-1} + \dots + \phi_p Y_{t-p} + \theta_1 e_{t-1} + \theta_2 e_{t-2} + \dots + \theta_q e_{t-q} + e_t
\]
ARMA(1, 1)
Let the process mean \(\mu\) be subtracted:
\[
Y_t = \phi Y_{t-1} + e_t + \theta e_{t-1}
\]
\(E(Y_t) = 0\)
\(\gamma_0 = Var(Y_t) = \phi^2 \gamma_0 + (1+\theta^2)\sigma^2 + 2\phi\theta Cov(Y_{t-1}, e_{t-1}) \rightarrow \gamma_0 = \frac{(1+2\phi\theta + \theta^2)}{1-\phi^2}\sigma^2\)
\(\gamma_1 = \phi\gamma_0+\theta\sigma^2\)
\(\gamma_k = \phi\gamma_{k-1} \quad k \ge 2\)
\(\rho_k = \frac{(1+\theta\phi)(\phi+\theta)}{1+2\theta\phi + \theta^2}\phi^{k-1}\)
ARIMA(p, d, q)
\(Y_t\) follows an integrated autoregressive moving average (non-seasonal) ARIMA(p, d, q) model if \(W_t = \nabla^d Y_t\) is a stationary ARMA(p, q) process.
\[
W_t = \mu + \phi_1 W_{t-1} + \dots + \phi_p W_{t-p} + \theta_1 e_{t-1} + \theta_2 e_{t-2} + \dots + \theta_q e_{t-q} + e_t
\]
\(p\) : order of the autoregressive part\(d\) : degree of first differencing involved\(q\) : order of the moving average part
Usually \(d\) is in \(\{0,1,2\}\) .
What are ARIMA(0,0,0), ARIMA(0,1,0), ARIMA(p,0,0), ARIMA(0,0,q)?
Least Squares: AR(1)
Putting back the \(\mu\) to estimate it:
\[
Y_t - \mu = \phi (Y_{t-1} - \mu) + e_t
\]
This is simple linear regression of \(Y_t\) versus \(Y_{t-1}\)
\[
SS(\mu, \phi) = \sum_{t=2}^n[(Y_t - \mu) - \phi (Y_{t-1} - \mu)]^2
\] Differentiating, setting this equal to zero, we get:
\(\hat{\mu}_{LS} \approx \bar{Y}\)
\(\hat{\phi}_{LS} \approx r_1\)
Least Squares: MA(1)
\[
Y_t - \mu = e_t + \theta e_{t-1}
\]
This isn’t simple linear regression, as \(e_t\) aren’t observed!
Option 1: invert MA(1) to AR(\(\infty\) ) and use numerical analysis: \[
SS(\mu, \theta) = \sum_{t=2}^n[(Y_t - \mu) - (\theta Y_{t-1} - \theta^2 Y_{t-2} - \theta^3 Y_{t-3} - \dots)]^2
\] Option 2: simple grid search on \(\theta \in (-1, 1)\) to get the minimum \(SS(\theta) = \sum e_t^2\) , where:
\[\begin{aligned}
e_1 &= Y_1 \\
e_2 &= Y_2 - \theta e_1 \\
&\vdots \\
e_n &= Y_n - \theta e_{n-1}
\end{aligned}\]
MLE: AR(1)
Assume \(e_t \sim \mathcal{N}(0, \sigma^2)\) i.i.d.
Is this true: \(L(\mu, \phi, \sigma^2| y) = \prod_{t=1}^n f(y_t; \mu, \phi, \sigma^2) = \prod_{t=1}^n \mathcal{N}(\mu, \frac{\sigma^2}{1-\phi^2})\)
The \(Y_t\) s are dependent!
E.g. \(\rho_1 = \phi\) .
They are, however conditionally independent:
\[\begin{aligned}
Y_2 &= \mu + \phi(Y_1 - \mu) + e_2 \\
Y_3 &= \mu + \phi(Y_2 - \mu) + e_3 \\
&\vdots \\
Y_n &= \mu + \phi(Y_{n-1} - \mu) + e_n
\end{aligned}\]
So: \(f(y_1, y_2, \dots, y_n) = f(y_1)f(y_2|y_1)\cdot \dots \cdot f(y_n|y_{n-1})\)
MLE: AR(1)
Now, \(Y_1 \sim \mathcal{N}(\mu, \frac{\sigma^2}{1-\phi^2})\)
From basic Gaussian probability, if \(X \sim \mathcal{N}(\mu_x, \sigma^2_x), Y \sim \mathcal{N}(\mu_y, \sigma^2_y)\) , then
\(Y|X \sim \mathcal{N}(\mu_y + \rho\frac{\sigma_y}{\sigma_x}(x - \mu_x), \sigma^2_y(1-\rho^2))\)
So: \(Y_t | Y_{t-1} \sim \mathcal{N}(\mu + \phi(y_{t-1} - \mu), \sigma^2)\)
After some algebra:
\[
l(\mu, \phi, \sigma^2| y) = -\frac{n}{2}\log(2\pi) -\frac{n}{2}\log(\sigma^2) +\frac{1}{2}(1-\phi^2) \\
-\frac{1}{2\sigma^2}\sum_{t=2}^n [y_t - \mu - \phi(y_{t-1} - \mu)]^2 - (1-\phi^2)(y_1 - \mu)^2
\]
But that sum of squares is exactly \(SS(\mu, \phi)\) for LS + a single term, thus:
\(\hat{\mu}_{MLE} \approx \hat{\mu}_{LS} \quad \hat{\phi}_{MLE} \approx \hat{\phi}_{LS} \quad \hat{\sigma}^2_{MLE} = \frac{SS(\hat{\mu}, \hat{\phi})}{n}\)
<- arima.sim (list (order = c (1 ,0 ,0 ), ar = 0.5 ), n = 50 )tsibble (y, t = days (1 : 50 ), index = t) |> model (ar1 = ARIMA (y ~ pdq (1 ,0 ,0 ))) |> report ()
Series: y
Model: ARIMA(1,0,0)
Coefficients:
ar1
0.4971
s.e. 0.1241
sigma^2 estimated as 1.068: log likelihood=-72.22
AIC=148.45 AICc=148.7 BIC=152.27
ar (y, order.max = 1 , aic = FALSE , method = "mle" )
Call:
ar(x = y, aic = FALSE, order.max = 1, method = "mle")
Coefficients:
1
0.4893
Order selected 1 sigma^2 estimated as 1.043
ar (y, order.max = 1 , aic = FALSE , method = "ols" , intercept= FALSE )
Call:
ar(x = y, aic = FALSE, order.max = 1, method = "ols", intercept = FALSE)
Coefficients:
1
0.4692
Order selected 1 sigma^2 estimated as 1.001
The Old Art of Model Selection
In all TS books there would appear a table similar to this:
ACF
Tails off
Cuts off after lag q
Tails off
PACF
Cuts off after lag p
Tails off
Tails off
The advantage is avoiding overfitting.
The disadvantages: time consuming, not accurate, hard to generalize to seasonal ARIMA
AIC, AICc
\[
AIC = -2l + 2(p + q + k + 1)
\] where \(l\) is the log-likelihood and \(k = 1\) if the mean \(\mu\) was estimated, otherwise \(k = 0\) .
\[
AIC_c = AIC + \frac{2(p+q+k+1)(p+q++k+2)}{n - p - q - k - 2}
\]
Do not use AIC to decide on difference order \(d\) .
ARIMA in fable
ARIMA in fable
|> model (Arima = ARIMA (log_count)|> report ()
Series: log_count
Model: ARIMA(1,0,1)(2,1,2)[12] w/ drift
Coefficients:
ar1 ma1 sar1 sar2 sma1 sma2 constant
0.8784 -0.2558 0.7841 -0.4800 -1.2514 0.531 -0.0022
s.e. 0.0269 0.0560 0.0955 0.0675 0.1007 0.076 0.0012
sigma^2 estimated as 0.01716: log likelihood=333.47
AIC=-650.95 AICc=-650.68 BIC=-616.53
You always need to perform Residuals Diagnostics.
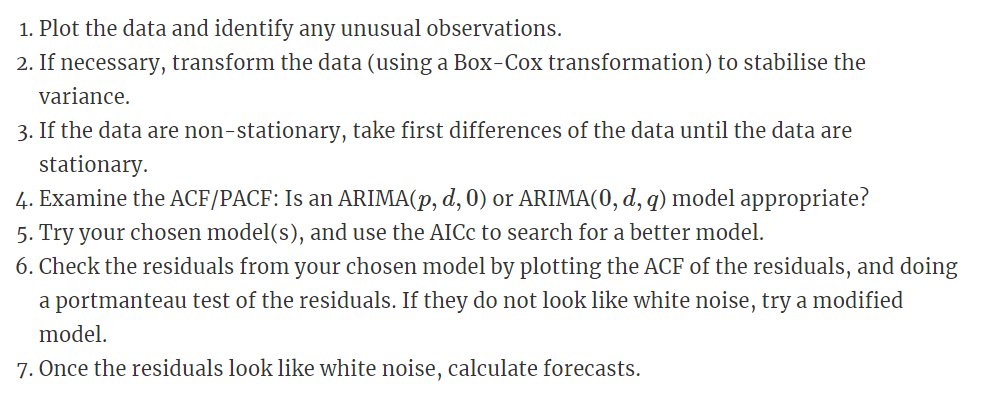
Practical Modeling
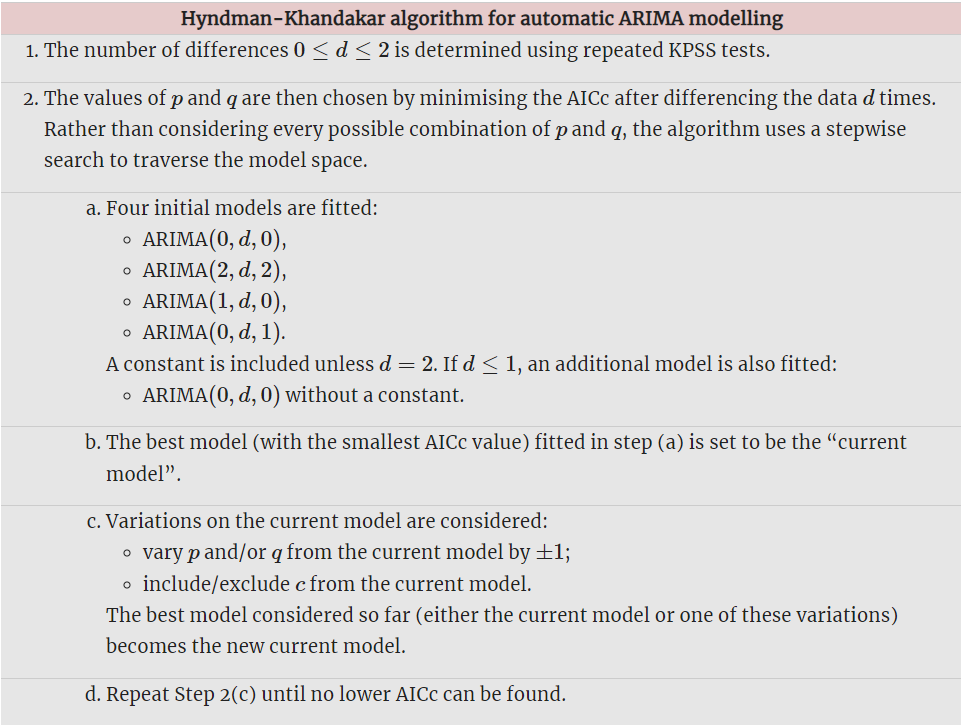
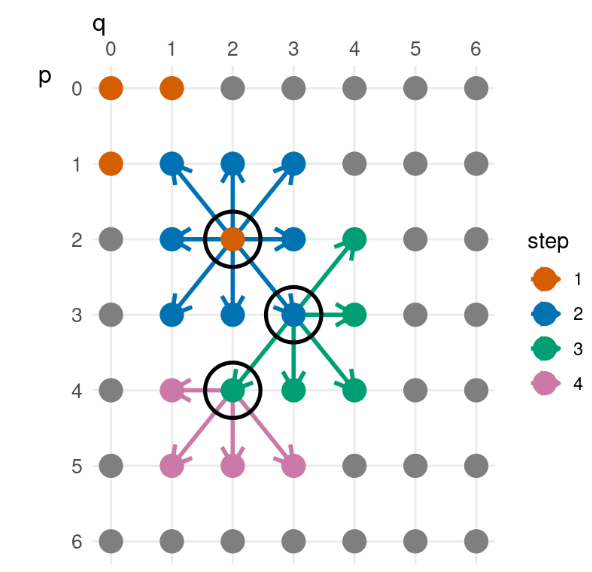
The Hyndman-Khandakar algorithm only takes care of steps 3–5.
Seasonal ARIMA